怎么对音箱驱动器进行正确的信号(时刻)对齐
从上世纪80年代前期开端,"时刻对齐"这个词就被翻来覆去地拿(ná)来评论,可(kě)是人们对它的了解一向不甚精确。

其实,人们早就注意到这个概念了。為(wèi)首部有(yǒu)声電(diàn)影《爵士歌手》(The Jazz Singer)供给音箱的工程师,发现在踢踏舞场景中,从高频号筒和从折叠号筒低频单元传出的踏步声有(yǒu)不同的抵达时刻。
从此,规划师尽心竭力对音箱进行时刻对齐。"时刻对齐"(time alignment)是E. M. Long公司的商(shāng)标,為(wèi)了便利评论,咱们将运用(yòng)通用(yòng)术语"信号对齐"(signal alignment),来避免一向运用(yòng)?和TM等标志(zhì)。
很(hěn)多(duō)人以為(wèi),对音箱内部的驱动器进行信号对齐,其实就是丈量出各个驱动器的音圈到箱體(tǐ)前部的间隔差,然后為(wèi)最靠近箱體(tǐ)前部的驱动器添加相应的延时,这样一切驱动器的信号就能(néng)正确对齐了。
可(kě)是,这并不精确!要对齐高频和低频驱动器的信号,咱们有(yǒu)必要首要了解滤波器和相位。
一切滤波器都"旋转"相位,使经过滤波器的频率发作正向"相位搬运"。由于360度相位搬运相当于一个波長(cháng),波長(cháng)能(néng)够经过间隔或时刻描绘,因而特定频率的任何相位搬运都能(néng)够经过一定时長(cháng)的信号延时表明。
比方,1000 Hz表明每秒(miǎo)循环1000个周期,所以一个波長(cháng)(或周期)就是一秒(miǎo)的千分(fēn)之一,即1毫秒(miǎo)(ms)。因而,1 kHz处的360度相位搬运相当于1毫秒(miǎo)延时,180度相位搬运(1/2波長(cháng))相当于0.5毫秒(miǎo)延时,90度(1/4波長(cháng))相当于0.25毫秒(miǎo)延时。而关于2 kHz,由于一个周期的波長(cháng)只要1 kHz的一半,因而相位搬运的延时时刻也是1 kHz的一半。以此计算, 20 Hz的180度相位搬运(1/2波長(cháng))相当于25毫秒(miǎo)延时或28.25英尺(以音速计算)。
实践运用(yòng)
这跟我评论的论题有(yǒu)什么关系呢(ne)?一切的分(fēn)频器和均衡滤波器都是電(diàn)子滤波器,会使经过的信号发作相位搬运/延时。相同地,一切的音箱都是声學(xué)滤波器,也会形成信号延时。 所以,要对齐低声单元和号筒驱动器(或高音单元)的信号,咱们不只要补偿各个驱动器到箱體(tǐ)前部的物(wù)理(lǐ)间隔差,还要补偿分(fēn)频器、每个驱动器独有(yǒu)的分(fēn)频后均衡滤波器以及作為(wèi)声學(xué)滤波器的音箱所形成的滤波器相位搬运延时。分(fēn)频前均衡滤波器不考虑在内,由于它们给两种驱动器形成相同的延时。
现在,让咱们将新(xīn)學(xué)的常识运用(yòng)到实践工作中,对一个两分(fēn)频音箱體(tǐ)系进行信号对齐。这个體(tǐ)系包含一个12英寸的低声单元(低频部分(fēn))和一个90°x 40°的号筒/紧缩驱动器(高频部分(fēn))。
开端之前,请确保两个驱动器的极性肯定共同,或至少相关联的极性有(yǒu)必要共同。可(kě)经过多(duō)种办法查看极性:(1)查看接線(xiàn);(2)在未启用(yòng)均衡器或分(fēn)频滤波器的情况下,对每个驱动器运用(yòng)极性查看器;(3)运用(yòng)丈量體(tǐ)系查看初次正向轰动的脉冲呼应。
图1 展现了低频和高频部分(fēn)的独自频率呼应。丈量Mic放置在两个驱动器的中心,间隔為(wèi)低声单元直径的五倍。请注意,在添加24 dB/倍频程(4阶)Linkwitz-Riley分(fēn)频滤波器之前,我现现已过EQ把每个部分(fēn)频率呼应调理(lǐ)得比较滑润,在分(fēn)频点频率也是这样。
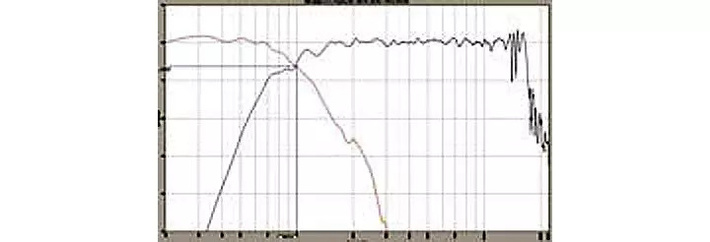
图1:运用(yòng)24 dB/倍频程Linkwitz-Riley分(fēn)频滤波器的独立低频&高频呼应,分(fēn)频点為(wèi)1 kHz
我发现首要经过每个驱动器特有(yǒu)的分(fēn)频后滤波器,对驱动器进行均衡处理(lǐ),可(kě)在高、低频呼应兼并时,為(wèi)分(fēn)频區(qū)域供给最滑润的频率呼应。这也能(néng)够让分(fēn)频滤波器以更挨近理(lǐ)论的抱负办法兼并在一起。
请注意,频响曲線(xiàn)相交之处即声學(xué)分(fēn)频频率,為(wèi)了进行信号对齐,若运用(yòng)的是4阶滤波器,交汇点应该在-6 dB处。要完成这个目标,有(yǒu)必要确保每个驱动器的電(diàn)平是共同的,然后调整電(diàn)子分(fēn)频器的频率,直至取得所需的声學(xué)成果。
本例中,我期望取得1 kHz分(fēn)频点。為(wèi)到达这个目标,终究两个驱动器的電(diàn)子分(fēn)频频率為(wèi)950 Hz。请记住,電(diàn)子分(fēn)频频率与均衡滤波器和声學(xué)滤波器(即音箱)密切相关并遭到它们的影响,均衡滤波器和声學(xué)滤波器才干发生真实有(yǒu)用(yòng)的声學(xué)成果。
图2 展现了两个驱动器的组合频响曲線(xiàn),它叠置于低频&高频的独立频响曲線(xiàn)上。请注意分(fēn)频处的抵消和600Hz邻近的小(xiǎo)提高。11 dB的波谷表明需求对驱动器进行信号对齐,由于它们发生了异相的相同频率,抵消了彼此的输出。这无法经过均衡修补,由于它将一起影响两个驱动器,相同还会呈现抵消。
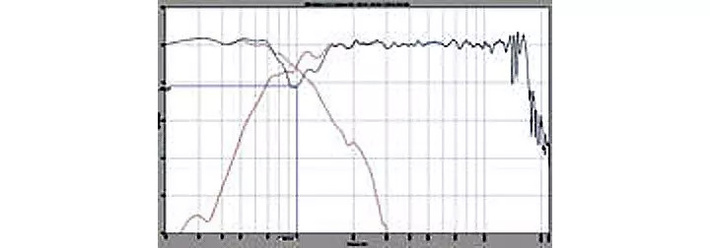
图2:两个驱动器的组合频率在分(fēn)频处有(yǒu)11 dB的波谷。
图3 添加了组合频响的相位曲線(xiàn)。请注意相位曲線(xiàn)分(fēn)频处斜度的俄然改变。这也表明,驱动器信号不对齐形成了频响曲線(xiàn)的波谷。
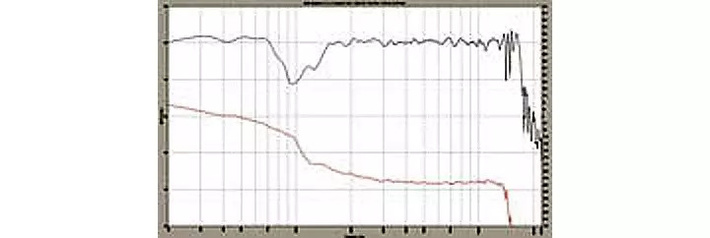
图3:从带相位曲線(xiàn)的驱动器组合频响图中,可(kě)看到分(fēn)频处斜度的俄然改变,显现驱动器信号為(wèi)对齐。
在这个阶段,大部分(fēn)执行信号对齐操作的工程师,将开端对最挨近箱體(tǐ)前部的驱动器添加延时,并调查相位曲線(xiàn)直至斜度变得尽可(kě)能(néng)直("直"而不是"平")。假如你的实时分(fēn)析器(RTA)无法丈量相位,那就太不幸了。这也会是一项十分(fēn)庸俗的任務(wù),由于最后几个延时进程,关于相位对齐优化的每一边,看起来几乎都相同。
这对频率呼应而言可(kě)能(néng)无关紧要,可(kě)是这儿的信号对齐还决议了分(fēn)频频率处,轴上波瓣的指向。要使波瓣筆(bǐ)直于箱體(tǐ)正面,最好在丈量Mic地点的方位,取得最佳对齐设置。
要找到最精确的对齐设置,最简便的办法可(kě)能(néng)是运用(yòng)实时分(fēn)析器。
回转高频驱动器的极性("极性",而不是"相位")。然后开端為(wèi)最挨近箱體(tǐ)的驱动器添加延时--本例中,最挨近箱體(tǐ)的驱动器是低声单元。
找到分(fēn)频处最大的抵消。不像前面将相位斜度弄直的办法,这个办法能(néng)轻松决议最大抵消处的延时步进。波谷可(kě)能(néng)有(yǒu)30至40 dB深,这个波谷即便在最佳延时的一步进之上或之下,都将小(xiǎo)几个dB。
图4 对比了高频回转极性前后的组合呼应曲線(xiàn)。很(hěn)幸运,回转极性的频响曲線(xiàn)看起来十分(fēn)平整。
很(hěn)多(duō)人到这儿就停步,开端运用(yòng)體(tǐ)系了。在DSP(数字信号处理(lǐ))呈现之前,人们的确经常这么做。音箱體(tǐ)系内置的无源分(fēn)频體(tǐ)系经常是10dB/倍频程(2阶)分(fēn)频器。
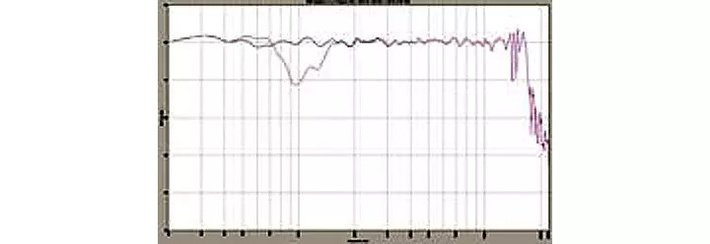
图4:驱动器极性相同的组合频响曲線(xiàn)(波谷)与高频驱动器极性回转的组合频响曲線(xiàn)(平整)
2阶分(fēn)频器在分(fēn)频点发生3 dB衰减,驱动器之间相位相差180度。回转高频部分(fēn)的相位让它们相位共同,在分(fēn)频处取得3 dB的提高。很(hěn)多(duō)带无源分(fēn)频器的音箱都是这样规划的。 这时,一个重要的问题是:你能(néng)听出肯定极性和回转极性信号之间的不同吗?简略的答(dá)复是:假如信号是十分(fēn)不对称的波形,你能(néng)够听出不同;假如信号是十分(fēn)对称的波形,你无法听出。
图5 所以,除非你听的仅仅長(cháng)笛独奏,不然你可(kě)能(néng)需求运用(yòng)现代DSP功用(yòng),為(wèi)两个驱动器供给优化的分(fēn)频,让它们的极性保持共同。从图5能(néng)够看出,在高频极性回转的组合呼应中,分(fēn)频频率处的相位斜度稍有(yǒu)转机,表明存在某种程度的不对齐。
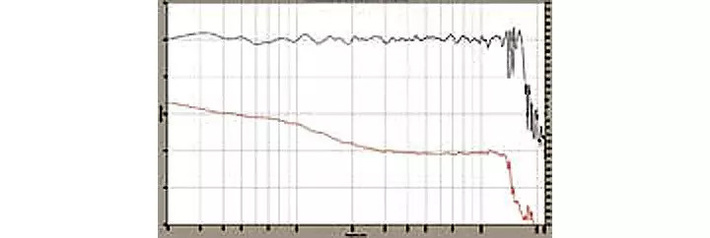
图5:高频极性回转的组合呼应曲線(xiàn)。请注意分(fēn)频处相位曲線(xiàn)的小(xiǎo)转机。
图6 展现了高频驱动器极性回转时,找到分(fēn)频处抵消的进程。分(fēn)频处的波谷深37 dB,最佳低频延时為(wèi)0.417毫秒(miǎo)。请注意,它比最挨近的0.396毫秒(miǎo)延时步进深10 dB。
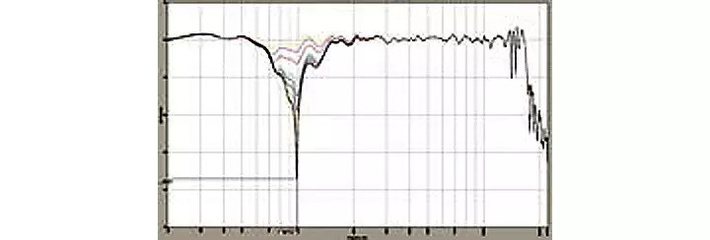
图6:高频驱动器极性回转时,找到最深的抵消。
图7 描绘了最深抵消的相位曲線(xiàn)。这是一条彻底筆(bǐ)直的直線(xiàn),表明刚好处于180度异相。
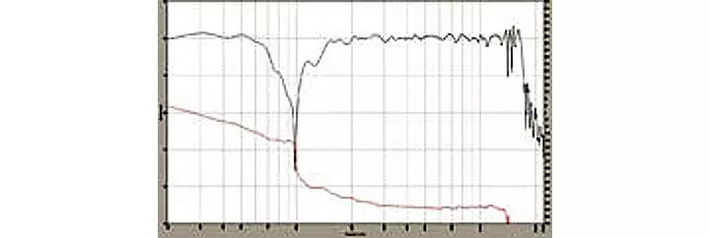
图7:最深抵消的相位斜度是一条筆(bǐ)直的直線(xiàn),表明刚好处于180度异相。
一旦找到高频驱动器极性回转时,发生最深抵消的延时步进,只需将高频驱动器的极性再次回转即可(kě)。你的體(tǐ)系现在现已信号对齐。
图8 是终究成果。与图5回转高频的呼应曲線(xiàn)比较,本图在分(fēn)频區(qū)域的相位曲線(xiàn)斜度愈加直缓,低声单元在600Hz邻近的呼应曲線(xiàn)也没有(yǒu)高频抵消波谷。
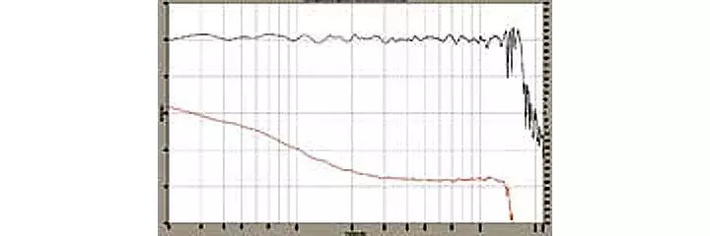
图8:高频相位再次翻转后的终究信号对齐。
假如你具有(yǒu)丈量相位的丈量體(tǐ)系,请承认终究的相位斜度是一条直線(xiàn)。这是為(wèi)了避免对错误的驱动器添加延时,或在短波長(cháng)的分(fēn)频频率处对正确的驱动器360度延时太多(duō)或太少,而形成前后偏离一个频率周期。终究的频率呼应可(kě)能(néng)看起来是相同的。假如运用(yòng)的实时分(fēn)析器不带相位丈量功用(yòng),需特别注意这一点。
 ∷
∷

 BadooSOUND
BadooSOUND BADOOSOUND
BADOOSOUND BADOOSOUND
BADOOSOUND

 BADOOSOUND
BADOOSOUND